| Title | Description | Researcher/Student | Dates | Results |
| Alpha - The Lead Dog |
Robot team leader; coordination; Internet human interaction;
information provider to robotic team; pass along communications
facilitator; team status and location reporting; team safety and
health checks. Seek to maintain current status and presence
information relating to people and team robots on the floor level and
whether unknown visitors are on the floor. Build the information base
on a web area, and use active e-mail or instant messaging alerts,
sounds, and gestures to attract attention to possible problems.
|
|
|
Results |
| Pixel - The Rescue Dog |
Move around rooms on floor level signalling unobtrusively and seeking
to maintain status of those willing to communicate. Be ready to more
actively signal and obtain status in emergency situations or when
floor is indicated as evacuate.
|
|
|
Results |
| Digit - The Advanced Rescue Dog |
Advanced, experimental and remote agent version of Pixel. |
|
|
Results |
| Kilobyte - The Guard Dog |
Cover main door area. Photograph any person entering and try best
to get it (later via Alpha for filtering) to central command site.
Signal any person entering. Use gestures or agreed codes, but later
other technologies, for progressively better recognition facilities to
identify person or identify as a stranger. Communicate status by any
possible route to Alpha or other team members. Seek to maintain
status of the person entering as on the floor level or not. Follow
intruders if possible and continue image taking and transmission.
|
|
|
Results |
| Terabyte - The Advanced Guard Dog |
Advanced, experimental and remote agent version of Kilobyte. |
|
|
Results |
| I-X Central Commander |
Desktop I-X systems to maintain contact with human and robotic
members of the team, mostly in cooperation with Alpha, to initiate,
control and monotor tasks, and to achieve a safe, secure and fun
environment without being intrusive to occupants of the building. |
| |
Results |
| I-X Remote Commander |
Palm Handheld I-X systems to maintain contact with one local team cluster, mostly in cooperation with a lead robot (e.g., Alpha), to coordinate tasking.
|
|
|
Results |
| I-X On-board <I-N-C-A> Agent Controller |
Can support tasking and reporting using the <I-N-C-A> Ontology to
I-X systems using a mixture of communications strategies.
|
|
|
Results |
| Linking an HTN Planner to a Robot Controller |
Using I-X, URBI and Webots
|
Dane Alexander |
2006 |
Results |
| AIBO Security and Rescue Task Library |
A library of lower level and some high level task-achieving behaviours
to assist in meeting the objectives of the project.
|
|
|
Results |
| Security and Rescue Environment Simulator |
A simulator of the environment and robotic team members
to assist in meeting the objectives of the project.
|
|
|
Results |
| Night Guard |
A set of behaviors for protection of the building at night, possibly in the
dark.
|
|
|
Results |
| Egress Aid |
A set of behaviours to act as an aid for staff or students with mobility
problems in a fire alarm situation. To act as a relay of their status
when at the egress point and awaiting firemen escape.
|
|
|
Results |
| Personal Companion |
A set of behaviours to act as a companion for an individual, and which can
act as friend and assistant or turn into an emergency reponse aid on necessity,
helping their companion in ways that are personalised to their needs,
and with knowledge of their individual, family and organisational context.
|
|
|
Results |
| Pursuit Ability of a Robot Pet |
To find a form of prey to chase and eventually catch.
To investigate how the
robot achieves behaviour selection, based on stimuli from the
environment.
|
Julien Roux
Heriot
Watt University | 2005 | Results |

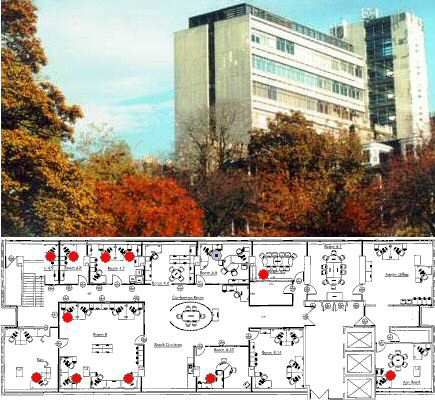 Appleton Tower is the home of the Centre for Intelligent Systems and
their Applications (CISA) and its Artificial Intelligence Applications
Institute (AIAI at the University of Edinburgh). These are AI
research groups in the School of Informatics. Level 4 of the Appleton
Tower is used for the demonstration systems and as a testbed.
Appleton Tower is the home of the Centre for Intelligent Systems and
their Applications (CISA) and its Artificial Intelligence Applications
Institute (AIAI at the University of Edinburgh). These are AI
research groups in the School of Informatics. Level 4 of the Appleton
Tower is used for the demonstration systems and as a testbed.