Edinburgh Freddy Robot (Mid 1960s to 1981)
Freddy and Freddy II were the robots used in research during the 1960s
and 1970s at the Department of Machine Intelligence and Perception
which became the Department of Artificial Intelligence at the
University of Edinburgh. Work continues in robotics at Edinburgh via the
School of Informatic's
Institute for Perception, Action
and Behaviour.
Freddy II is the best known of the Edinburgh research robots from the
1970s. It utilised a heavy robot arm fixed to an overhead gantry with
adaptive grippers. A binocular vision system was also mounted to the
fixed gantry. The "world" consisted of a table that could be moved in
two directions, giving the robot the impression of moving through its
world.
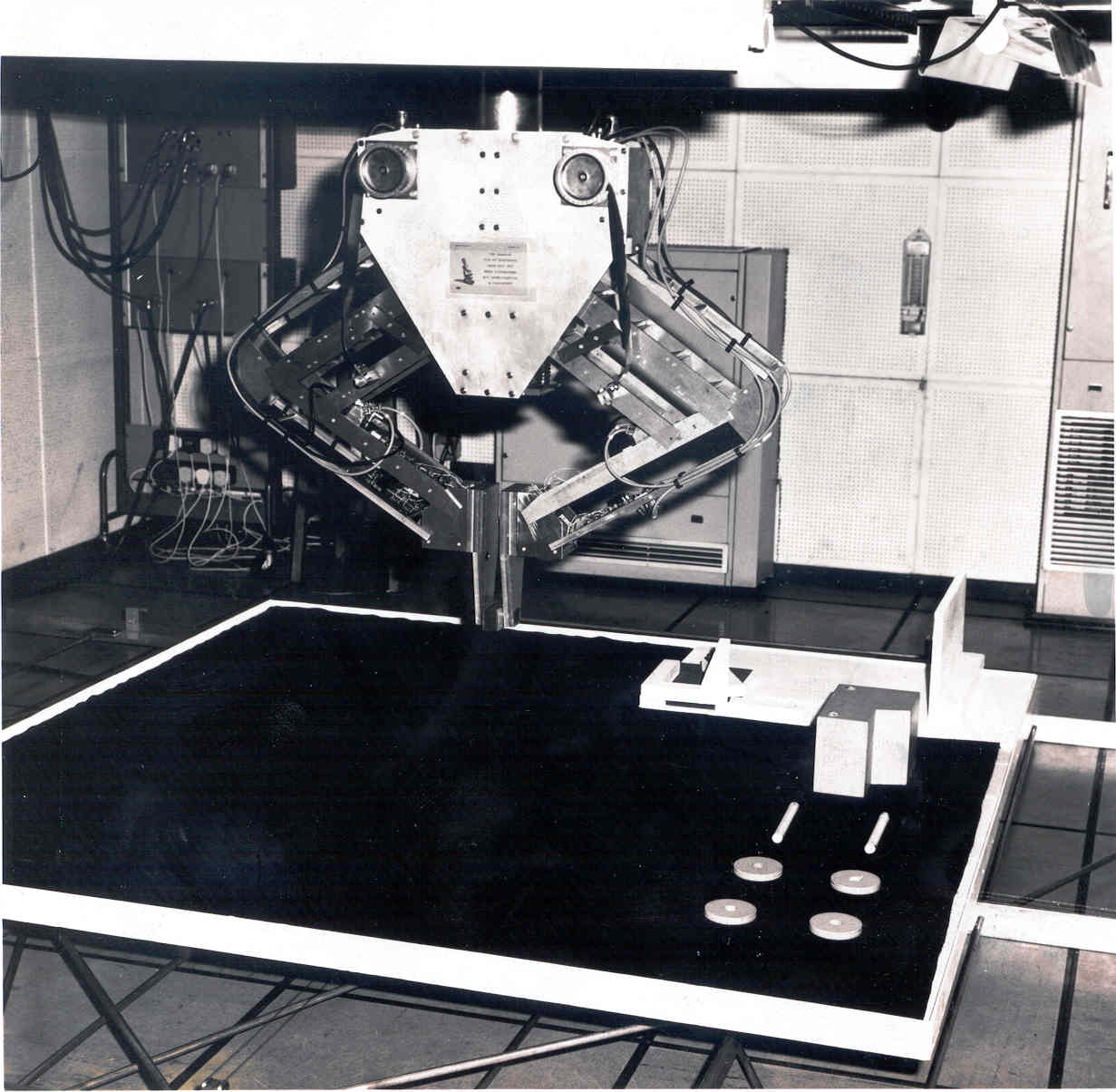
Freddy II Robot around 1973-6
Other Freddy II Robot Resources
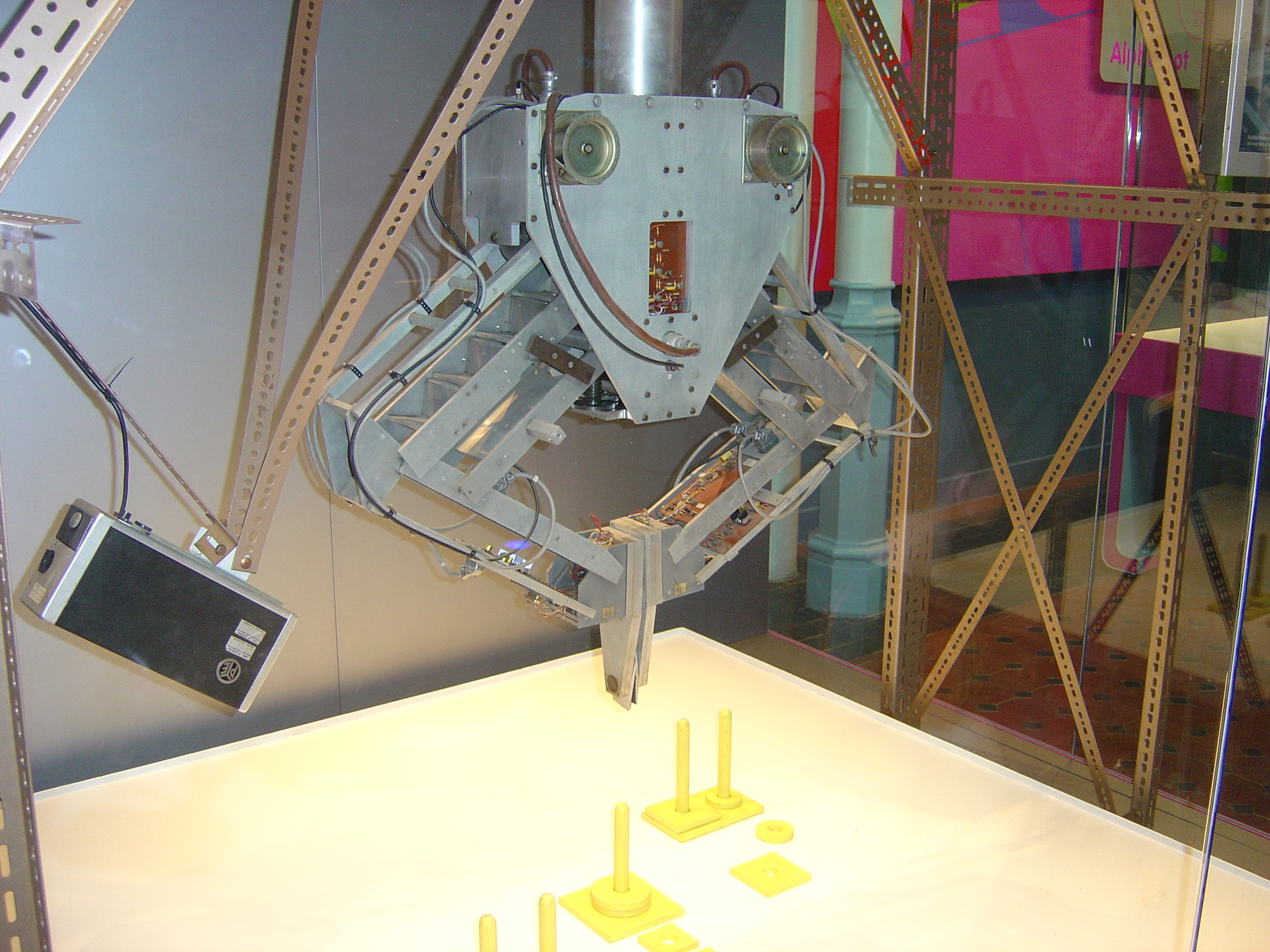
Freddy II Robot at National Museum of Scotland 2006
The mispelling of the robot's name as "Freddie" was corrected shortly after it was first put on display.
Freddy, the Famous Scottish Robot
Freddy (mid 1960s - 1981) was one of the first robots to be able to
assemble wooden models using vision to identify and locate the parts
-- given a jumbled heap of toy wooden car and boat pieces it could
assemble both in about 16 hours using a parallel gripper and single
camera (1973). The 16 hours was due to the slowness of movement of the
robot, an artefact of the limited computational power available for
movement control in those days. An Elliot 4130 computer with 64k
24-bit words, later upgraded to 128k, was the main computer. A
Honeywell H316, initially with 4k 16-bit words, later upgraded to 8k,
controlled the robot motors and cameras. The videos we now have of
Freddy's assembly work have been dubbed from 16mm film, as video
hadn't been invented then. Even with today's knowledge, methodology,
software tools, and so on, getting a robot to do this kind of thing
would be a fairly complex and ambitious project. In those days, when
they had to design and buld the robot, design and build the
programming system, design and build the vision system, etc., it was a
heroic pioneering feat which required to be demonstrated in practice
in order to convince some that it was even possible.
Key Reference
A. P. Ambler, H. G. Barrow, C. M. Brown, R. M. Burstall, and
R. J. Popplestone, A Versatile Computer-Controlled Assembly System,
Proc. Third Int. Joint Conf. on AI, Stanford, California, pp. 298-307,
1973.
[PDF]
RAPT
Freddy's famous car and boat asssembly above was programmed as a list
of end-effector positions. The great tedium and lack of generality in
programming assembly robots in this way prompted the search for a
higher level of assembly description. RAPT permitted robot positions
and movements to be specified in terms of relationships (such as
parallel, aligned, against) between geometric features (such as point,
edge, and surface) of the parts being assembled. By 1980 this was well
developed (largely by Popplestone, Ambler, and Bellos) and had been
integrated with a solid geometric modeller front end (by Cameron) to
facilitate part description and trajectory planning. The geometric
nature of vision permitted its neat integration within the RAPT system
using such ideas as a plane-of-gaze (defined by lens centre and two
points in image plane marking an object edge) projected out and
touching the edge of the real object (by Yin). The attempt in the mid
1980s to include reasoning about uncertainty based on tolerances on
dimensions and positions, errors in robot movements, etc., foundered
on a combinatorial explosion of computation.
This raised the interesting question of whether this was an unavoidably hard problem which simply needed very much more powerful computers, or whether there was another computationally cheaper way of tackling the problem.
Key Reference
Popplestone, R.J., Ambler, A.P., and Bellos, I., An Interpreter for a
Language for Describing Assemblies, Artificial Intelligence Vol. 14,
No. 1, pp. 79-107, 1980.
In the 1970's Edinburgh University's Freddy robot was the vehicle for
the Informatics Department's early artificial intelligence work on
what might be termed hand/eye co-ordination in assembly robotics. The
most noteworthy achievement was the Versatile Assembly Program, which
enabled the robot to construct a toy boat and a toy car from a heap of
mixed parts tipped onto the table. This experiment demonstrated that
it was very difficult to devise successful assembly programs for a
sensor-based robot, when the robot was programmed in terms of
sequences of positions of its end-effector in Cartesian space. This is
still the method used in commercial assembly robots today.
|
© 2005, Page Content and Images:
CC-BY 4.0.
Use on this public web site for open access is approved. Otherwise web
site materials are the copyright of the individual contributors and
organizations they belong to.
Page maintained by
a.tate@ed.ac.uk,
Last updated: Mon Jul 28 08:56:05 2025
|
|